Milne Technologies offers full lake bathymetry and mapping services.
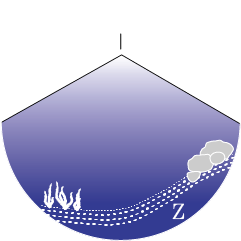
Bathymetric depth profiling is completed using a Kongsberg-Mesotech Ltd. M3 multi-mode multibeam sonar system. The M3’s associated signal processing software forms a 120° swath image (in the athwartship plane) of the water column formed by 256 receive beams, each with an apparent beam-width of ≤ 1.6° x 3° (. The wide swath essentially paints the bottom with sound! The M3 host software provides a sophisticated bottom detection algorithm to generate 256 bottom points per acoustic transmission (or ping). At approximately 6 pings per second, that’s >1500 depth points per second!!
Accurate spatial positioning (≤+/-2 cm) is provided by our Hemisphere RTK GNSS system and vessel attitude (pitch, roll, and heave) corrections are provide by our SBG and Kongsberg MRU/INS sensors.
The result is a seamless and high-resolution bathymetry model of the acoustic bottom with minimal interpolation. Our services include mapping lakes, rivers, wastewater lagoons, tailings ponds and cooling-water forebays.
Ask us about our remote operated surface vehicle for mapping high-risk areas!